Un androide dotado de tacto y con sensores de fuerza permitirá explorar a distancia la Luna y los planetas, según anunció la Agencia Espacial Europea (ESA), que indicó que el robot podría estar listo “en dos o tres años”.
El androide ha recibido el nombre de “Justin”, está siendo desarrollado por el Centro Aeroespacial Alemán y podrá ser controlado a distancia por los astronautas de la Estación Espacial Internacional (EEI).
La ESA explicó en un comunicado que el robot será capaz de reproducir con exactitud los movimientos de los astronautas en la EEI, y que estos utilizarán un exoesqueleto -una estructura que recubre los brazos y las manos, repleta de sensores y de actuadores electrónicos- para trabajar a distancia. Eso les permitirá operar con la misma precisión que tendrían si estuviesen físicamente en el lugar donde se encuentra el robot, señaló la agencia.
La ESA agregó que, para poder convertir la robótica y las técnicas de tele-presencia en una herramienta estándar de las futuras misiones espaciales, prepara un enlace entre la Tierra y la EEI que permitirá controlar experimentos robóticos desde el complejo orbital.
Se trata de una iniciativa, conocida como Meteron (acrónimo inglés de Red Punta a Punta Multiuso para Operaciones Robóticas) , que “ permitirá probar las tecnologías necesarias para las futuras misiones de exploración de la Luna, Marte u otros cuerpos del sistema solar ” , explicó la ESA.
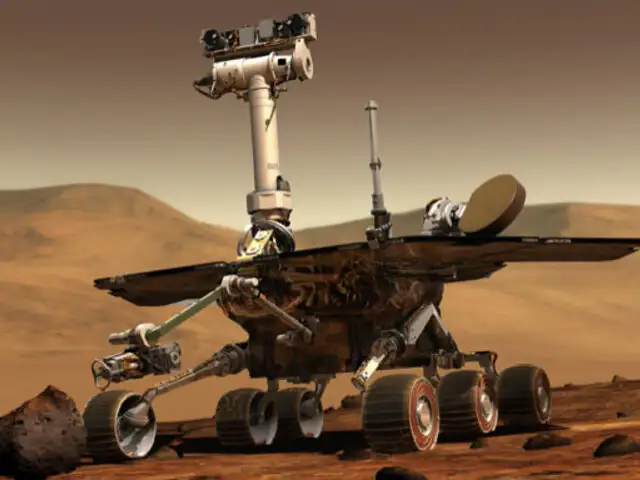
En la primera fase de Meteron, los astronautas de la estación espacial controlarán a distancia un prototipo del vehículo Eurobot de la ESA desde un ordenador equipado con un “joystick” y unos monitores especiales.
Este prototipo es un “ rover ” de cuatro ruedas y dos brazos, que cuenta con un avanzado sistema de navegación, cámaras y sensores y que se está probando desde 2008 en el Centro Europeo de Investigación y Tecnología Espacial de la ESA en los Países Bajos. En la siguiente fase, los astronautas podrán manejar un robot dotado de “ tacto ” y sensores de fuerza, un sistema con el cual se podrán controlar androides como el Justin desarrollado por el Centro Aeroespacial Alemán.
“Gracias a estos sensores, los astronautas podrán sentir la fuerza real que está ejerciendo el robot en su entorno de trabajo”, según André Schiele, responsable del Laboratorio de Tele-robótica y Háptica de la ESA. “ Esto será especialmente útil para desplazar rocas o desarrollar tareas complejas, como el ensamblaje de equipos” , agregó Schiele en la nota de la agencia.